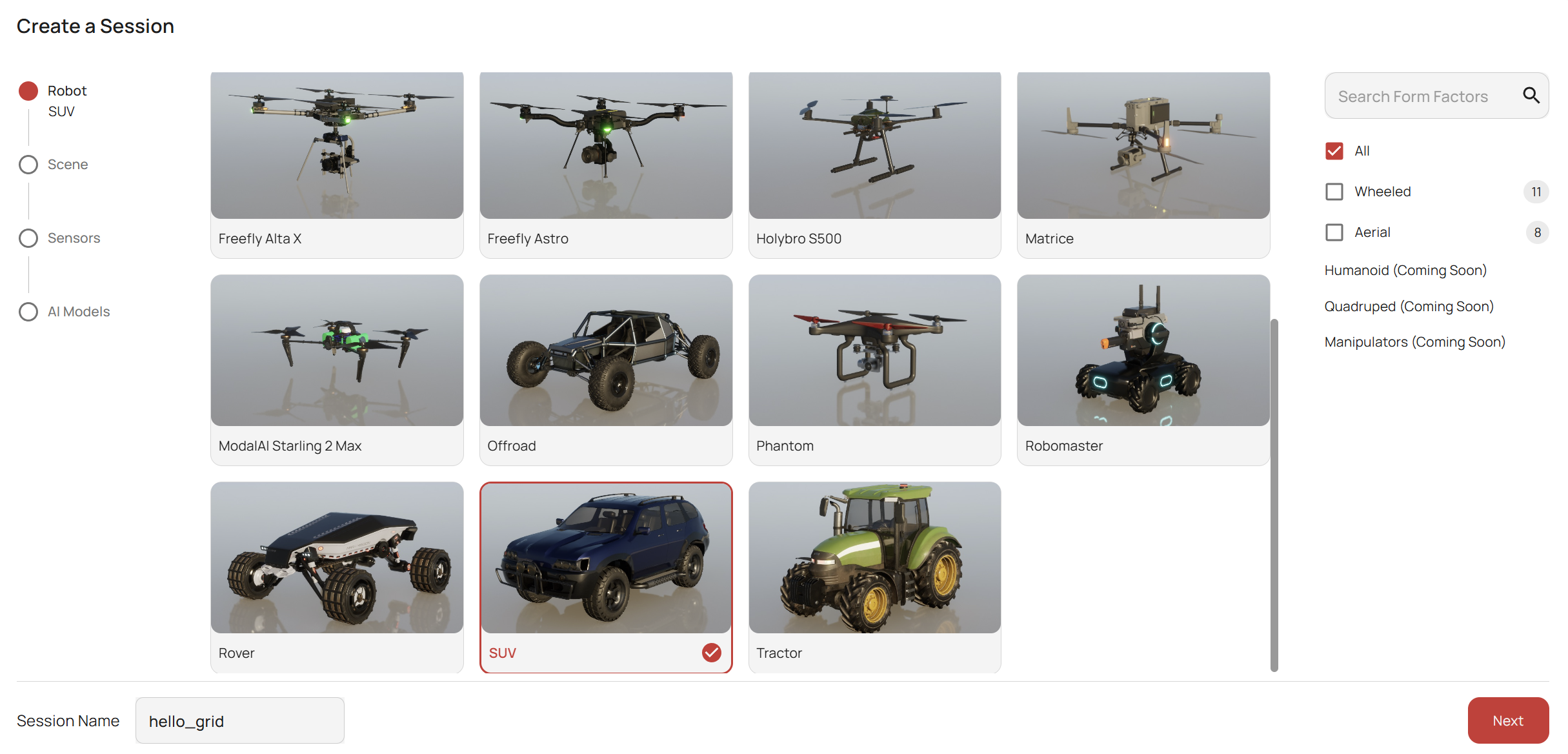
Selecting a Robot Type
Users are presented with a choice between aerial and ground robots. Currently, the available options are:Aerial Robots
Aerial category encompasses various models of aerial drones, each suited to different simulation needs. Available aerial robots include:- Agricultural Drone
- eVTOL
- Freefly Alta X
- Freefly Astro
- Holybro S500
- Matrice
- ModalAI Starling 2 Max
- Phantom
Wheeled Robots
Ground vehicles that can be used for various simulation scenarios, such as autonomous driving, warehouses, offroad scenarios. Available wheeled robots include:- Agile X Hunter
- Agile X Scout
- Clearpath Husky
- Delivery Robot
- Farm-ng Amiga
- Forklift
- Offroad
- Robomaster
- Rover
- SUV
- Tractor
Manipulation Robots
Robotic arms used for picking, placing, assembly, and other industrial or research tasks requiring precise movement and control. Available manipulation robots include:- Franka Panda
- UR5e
Quadrupeds
Four-legged robots capable of traversing challenging terrains and maintaining stability in diverse environments. Ideal for search and rescue, inspection, and research applications. Available quadruped robots include:- Unitree Go2
- Unitree A1
- Anymal C
Bipeds
Humanoid robots with two legs, designed to mimic human movement and interaction. Available biped robots include:- Cassie
Humanoids
Robots designed to resemble humans in appearance and movement. Available humanoid robots include:- Unitree G1
- Unitree H1
- Agility Digit
We are constantly updating our offering of robots and if you want your favorite robot to be added to the list, please let us know on our Discord Community or reach out to us on our email.
Initial Position and Geo-Location Configuration
After selecting a multirotor model, users can define the initial starting parameters:- Position: Each simulation environment has a pre-defined starting position for the robot. The X, Y, and Z values are offsets from the start position.
- Geo Location: This setting is mainly useful for geospatial environments (Google Maps or Bing Maps) where the robot’s initial position is defined by the latitude, longitude, and altitude in decimal format.
The selected robot model will have predefined capabilities and restrictions. It is essential to choose a model that aligns with the objectives of your simulation.