Estimate depth from a single RGB image using ZoeDepth. Returns metric depth values in meters.
Parameters
image_input
str | PIL.Image | np.ndarray
required
RGB image as file path, URL, PIL Image, or numpy array.
Optional timeout in seconds for the HTTP request.
Returns
np.ndarray — Depth map of shape (H, W) with dtype float16 (the client converts to float32 on read). Values represent metric depth in meters.
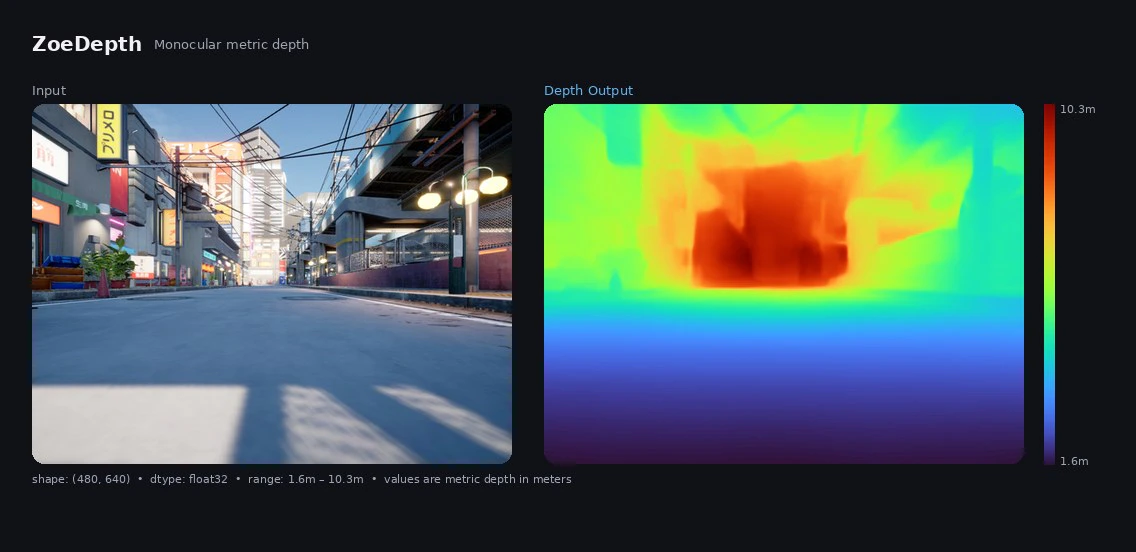
Example Output
Example
from grid_cortex_client import CortexClient
from PIL import Image
client = CortexClient()
image = Image.open("scene.jpg") # 640x480 RGB
depth = client.run(model_id="zoedepth", image_input=image)
print(depth.shape, depth.dtype)
# (480, 640) float32
print(f"min={depth.min():.4f}, max={depth.max():.4f}, mean={depth.mean():.4f}")
# min=1.5889, max=10.2891, mean=4.6381 (meters)