> ## Documentation Index
> Fetch the complete documentation index at: https://docs.generalrobotics.dev/llms.txt
> Use this file to discover all available pages before exploring further.
# GRID
> A General Robot Intelligence Development platform that enables seamless, end-to-end Robot AI development.
[Start Building in Minutes](https://grid.generalrobotics.dev/)
 ## GRID provides seamless access to:
Run high-fidelity simulations with a variety of simulators such as AirGen and Isaac Sim. Import your own robots, or entire 3D scenes through Gaussian splatting. Leverage Unreal Engine 5 or Omniverse for scalable and performant data generation, policy training, and domain randomization - either in the cloud or on-prem.
## GRID provides seamless access to:
Run high-fidelity simulations with a variety of simulators such as AirGen and Isaac Sim. Import your own robots, or entire 3D scenes through Gaussian splatting. Leverage Unreal Engine 5 or Omniverse for scalable and performant data generation, policy training, and domain randomization - either in the cloud or on-prem.
 ```json theme={null}
"sim": {
"sim_type": "airgen",
"scene_name": "gsplat",
"kwargs": {
"geo": false,
"ply_file": "abandoned_mine.ply"
}
}
```
Generate domain-rich datasets at scale for your form factor of choice - by bringing in realistic objects, equipping a variety of sensors, and varying weather and other environmental conditions. Parallelize over multiple machines, capturing camera, LiDAR, as well as rich ground truth for comprehensive robot training data.
```json theme={null}
"sim": {
"sim_type": "airgen",
"scene_name": "gsplat",
"kwargs": {
"geo": false,
"ply_file": "abandoned_mine.ply"
}
}
```
Generate domain-rich datasets at scale for your form factor of choice - by bringing in realistic objects, equipping a variety of sensors, and varying weather and other environmental conditions. Parallelize over multiple machines, capturing camera, LiDAR, as well as rich ground truth for comprehensive robot training data.
 ```python theme={null}
def readSensors(client) -> dict:
sensor_data["imu"] = client.getImuData()
sensor_data['rgb'] = client.getImages("front_center",[airgen.ImageType.Scene])[0]
sensor_data["lidar"] = client.getLidarData()
return sensor_data
@data_collector(readSensors, time_delta=0.1)
def move_task(client, trajectory):
client.moveOnPath(trajectory)
```
Invoke state-of-the-art AI models with just a few lines of code to create complex skills for your robots. Train or fine-tune your own, leveraging built-in autonomy stacks for mapping, planning, and trajectory generation. Chain multiple models for complex tasks, track performance across a variety of scenarios, and streamline iteration until your solution is fully deployment-ready.
```python theme={null}
def readSensors(client) -> dict:
sensor_data["imu"] = client.getImuData()
sensor_data['rgb'] = client.getImages("front_center",[airgen.ImageType.Scene])[0]
sensor_data["lidar"] = client.getLidarData()
return sensor_data
@data_collector(readSensors, time_delta=0.1)
def move_task(client, trajectory):
client.moveOnPath(trajectory)
```
Invoke state-of-the-art AI models with just a few lines of code to create complex skills for your robots. Train or fine-tune your own, leveraging built-in autonomy stacks for mapping, planning, and trajectory generation. Chain multiple models for complex tasks, track performance across a variety of scenarios, and streamline iteration until your solution is fully deployment-ready.
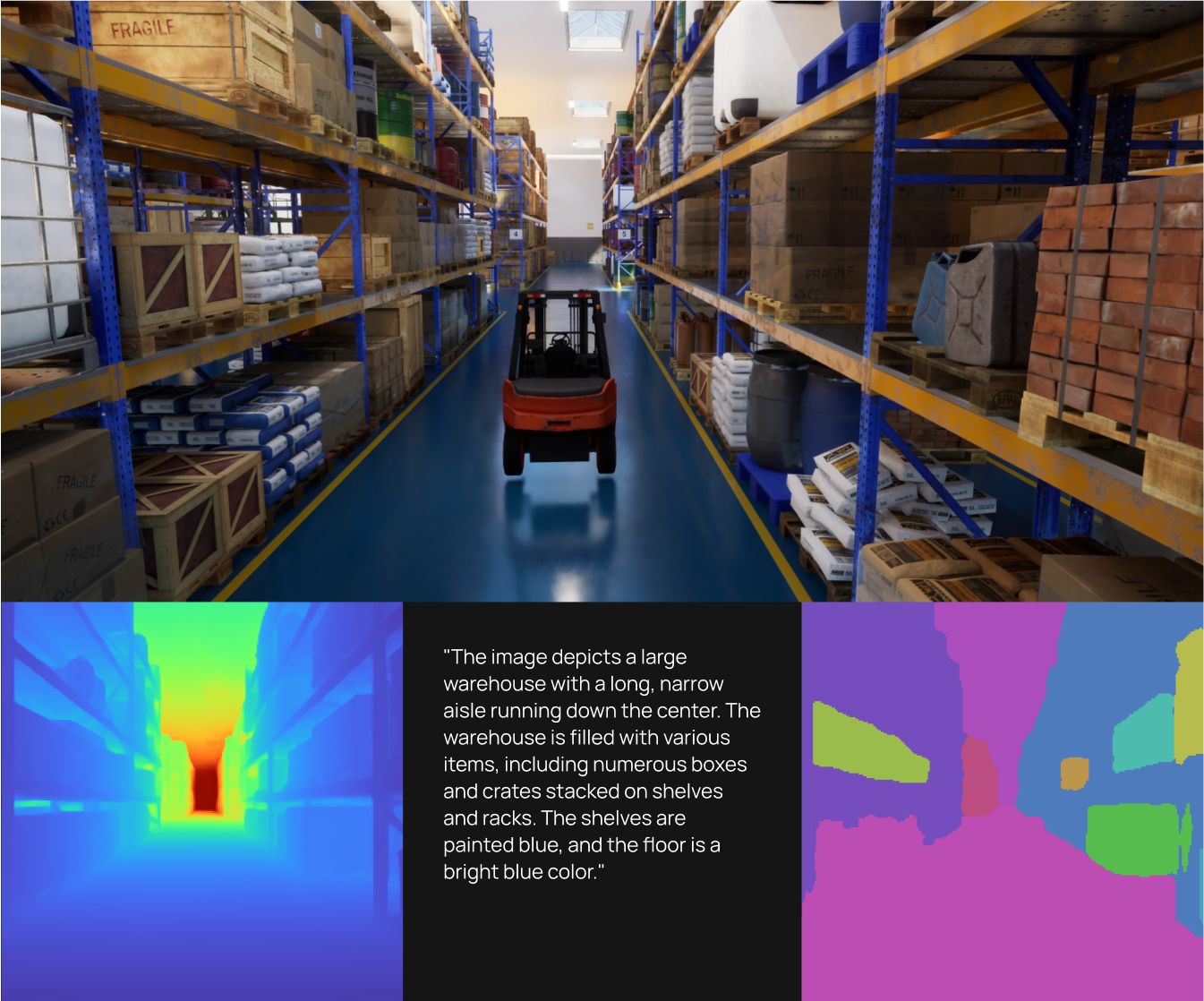 ```python theme={null}
from grid.model.perception.vlm.moondream import MoonDream
from grid.model.perception.segmentation.oneformer import OneFormer
from grid.model.perception.depth.metric3d import Metric3D
depth_model = Metric3D()
seg_model = OneFormer()
vl_model = MoonDream()
depth_pred = depth_model.run(rgb_image.data)
seg_pred = seg_model.run(rgb_image.data, mode="panoptic")
vl_model.run(rgb_image.data, "Describe what you see")
```
Seamlessly deploy into robots with native support for industry standard protocols like ROS2, MAVLINK, and more. Efficient middleware techniques and cloud-centric workflows enable dynamic orchestration and effortless scalability.
## Choose your GRID experience:
Web-based platform to deploy, train, validate and deploy intelligent robots
Packaged GRID for a scalable, customizable and private GRID experience.
## Get Started
Have questions or ran into a bug? Join our community of AI innovators and roboticists
Build interactive features and designs to guide your users
```python theme={null}
from grid.model.perception.vlm.moondream import MoonDream
from grid.model.perception.segmentation.oneformer import OneFormer
from grid.model.perception.depth.metric3d import Metric3D
depth_model = Metric3D()
seg_model = OneFormer()
vl_model = MoonDream()
depth_pred = depth_model.run(rgb_image.data)
seg_pred = seg_model.run(rgb_image.data, mode="panoptic")
vl_model.run(rgb_image.data, "Describe what you see")
```
Seamlessly deploy into robots with native support for industry standard protocols like ROS2, MAVLINK, and more. Efficient middleware techniques and cloud-centric workflows enable dynamic orchestration and effortless scalability.
## Choose your GRID experience:
Web-based platform to deploy, train, validate and deploy intelligent robots
Packaged GRID for a scalable, customizable and private GRID experience.
## Get Started
Have questions or ran into a bug? Join our community of AI innovators and roboticists
Build interactive features and designs to guide your users